mirror of
https://github.com/davrot/pytutorial.git
synced 2025-06-06 22:00:01 +02:00
|
|
||
|---|---|---|
| .. | ||
| image0.png | ||
| README.md | ||
{kind=link}
FastICA
{:.no_toc}
* TOC {:toc}The goal
Questions to David Rotermund
Test data
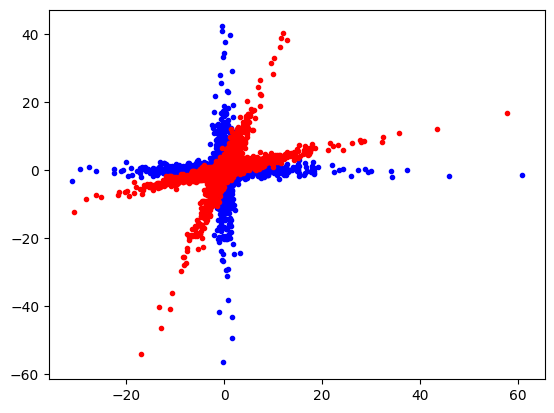
import numpy as np
import matplotlib.pyplot as plt
rng = np.random.default_rng(1)
a_x = rng.normal(0.0, 1.0, size=(5000))[:, np.newaxis]
a_y = rng.normal(0.0, 1.0, size=(5000))[:, np.newaxis] ** 3
data_a = np.concatenate((a_x, a_y), axis=1)
b_x = rng.normal(0.0, 1.0, size=(5000))[:, np.newaxis] ** 3
b_y = rng.normal(0.0, 1.0, size=(5000))[:, np.newaxis]
data_b = np.concatenate((b_x, b_y), axis=1)
data = np.concatenate((data_a, data_b), axis=0)
angle_x = -0.3
angle_y = 0.3
roation_matrix = np.array(
[[np.cos(angle_x), -np.sin(angle_x)], [np.sin(angle_y), np.cos(angle_y)]]
)
data_r = data @ roation_matrix
plt.plot(data[:, 0], data[:, 1], "b.")
plt.plot(data_r[:, 0], data_r[:, 1], "r.")
plt.show()